|
Soft Robotics
|
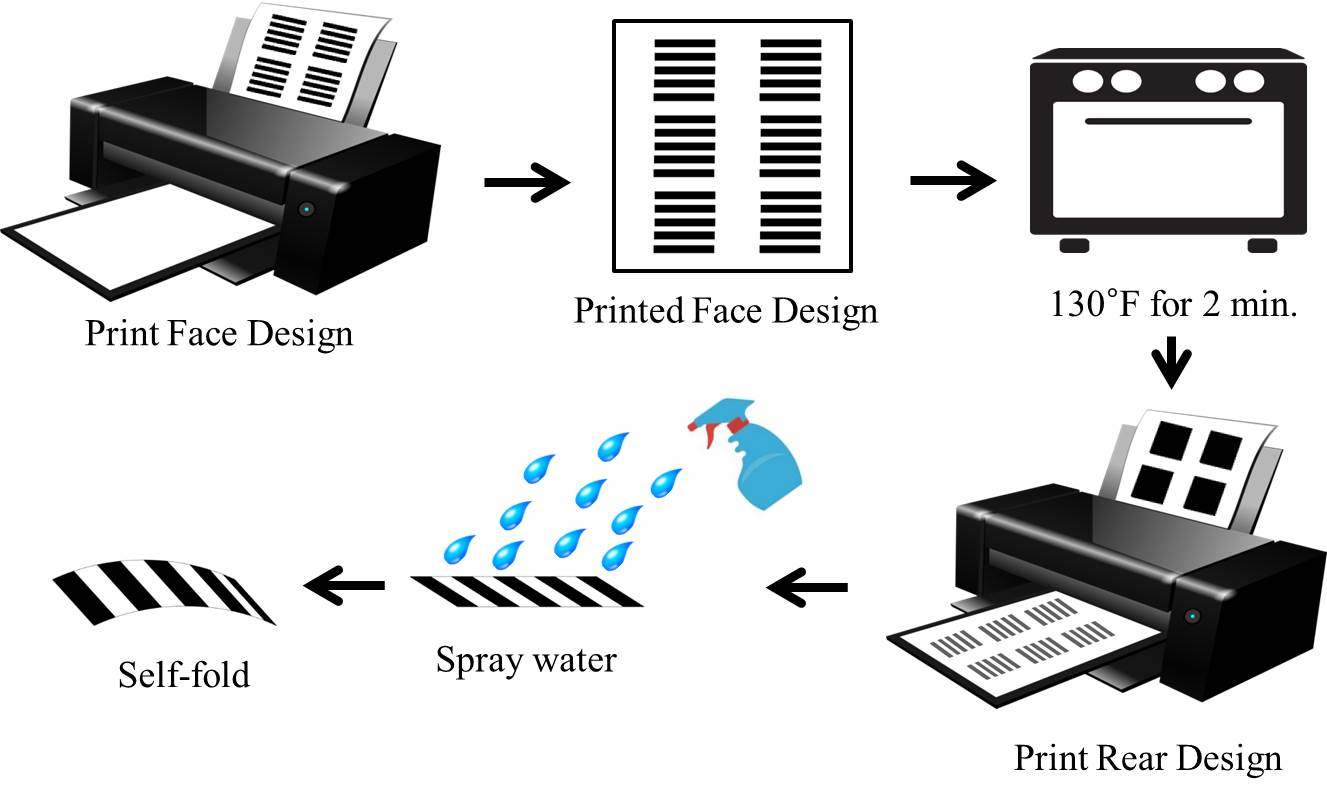
Soft robotics has emerged as a promising field of research to revolutionize wearable, healthcare, and manufacturing applications. Such robots promise substantial advantages over traditional rigid robots in accomplishing open-ended tasks in an unstructured environment and in physical interfaces with biological organisms, including humans. In contrast to their rigid counterparts, soft materials may easily deform and adapt to a wide range of surroundings. Recently, active soft materials for self-folding robots have attracted significant attention because they inherently convert other forms of energy into mechanical force to create structures without the application of external manipulations. Many self-folding techniques have been developed by using hydraulic, pneumatic, electrical, thermal or magnetic actuations. Here, we introduced an innovative self-folding method with a microfluidic capillary force in paper. This new technique enabled a flat paper sheet to self-fold to desired angles with wax patterns, which will be advantageous for many applications inexpensively and autonomously in remote and dangerous environments.
|
